

環顧全球車壇發展,汽車安全科技不斷地在車廠研發下,逐步完善與進步。昔日根據每項防護重點所開發的安全配備,已形成相當完備的汽車安全架構。各家車廠均在累積一定的研發能量後,對外發表最新穎的汽車安全設計,而 Toyota 亦已宣佈往後汽車安全發展的最新方向-「整合安全管理」,以展現提升汽車安全科技的核心概念。
整合安全管理概念
Toyota 所提出的「整合安全管理」(Integrated Safety Management)汽車安全概念,簡而言之,即是將各項成熟的安全科技進行整合的動作,以發揮理想的安全綜效。「整合安全管理」的重要出發點,在於能創造以駕駛所面對的複雜環境為基礎,加以整合各項安全科技,以提供駕駛最理想的安全協助。因此,新概念將打破舊有的安全架構,超越舊有僅單純整合車內安全科技與防護系統的設計,而將車外道路環境與其他車輛等因素,完全納入並與所駕駛車輛進行密集互動,以發揮協同安全的理想功效。
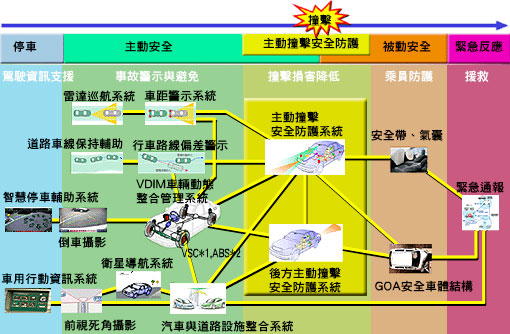
另一項重要概念,是安全防護等級的提出,Toyota 將影響人車安全劃分為五個等級,包括停車、主動安全、主動撞擊安全防護、被動安全與緊急反應等五項等級,而所有安全防護設計,不僅將各自因應不同等級的安全防護,在新整合概念下,彼此間將進行整合與聯繫,以達到最理想的安全效能。
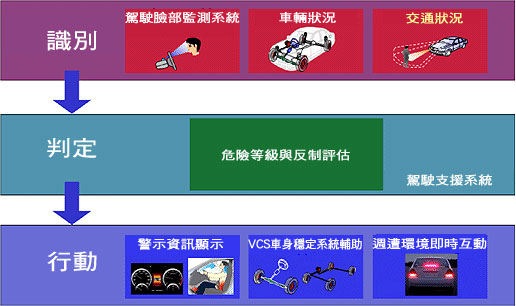
在提出全新的安全架構後,如何讓安全系統依照此概念進行運作,對此,Toyota 研發出 DSS 駕駛支援系統中央電腦(Driver Support System),透過分佈於全車的各種感應裝置,密集彙整駕駛與車輛的即時動態後,此套電考系統的最重要功能,就是在精算後提出最理想的支援動作,運用多項安全科技以防止任何危險的發生。
新一代主動撞擊安全防護系統
而用來支撐全新整合安全架構的,正是 Toyota 新一代主動撞擊安全防護系統、主動安全系統與停車系統的研發成果。首先,回顧,主動撞擊安全防護系統最早於 2003 年 2 月,移植入 Toyota Harrier(Lexus RX300),成為全球首款搭載主動安全防護系統的車款。
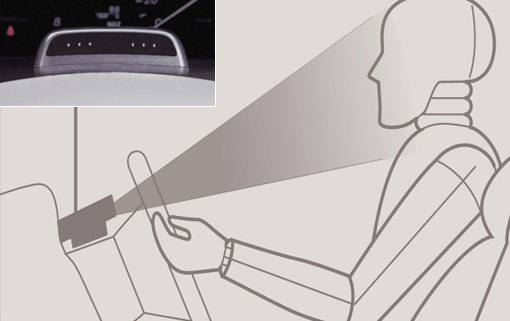
此套系統的運作原理,主要是透過裝置於車頭前方的雷達裝置,在行駛過程中,即時地向前方車輛與障礙物進行掃描,以協助避免重大撞擊意外的發生。之後,在經歷加裝前方攝影系統以提升性能後,最新一代的系統出現在 2006 年 3 月發表的 Lexus LS460 上,以全球首次搭載的駕駛監控攝影系統,成為當今主動撞擊安全防護系統一大創舉。
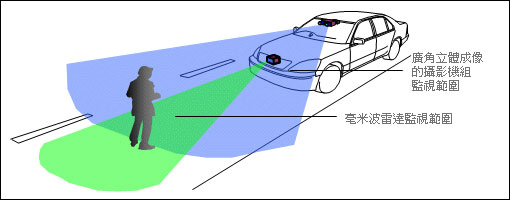
整體而論,Toyota 新一代主動撞擊安全防護系統的發展方向,是延續並強化原先的設計概念。因此,新系統不僅擁有功能進化的雷達設備,更搭載具備廣角立體成像的攝影機組,以提供駕駛對於車輛、障礙物甚至行人等對象時,擁有最為清晰詳實的辨識能力。
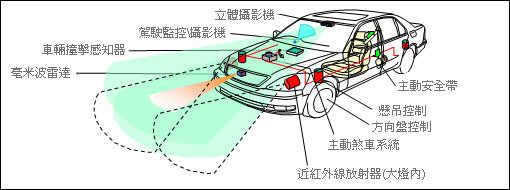
即便處於視線不佳的夜晚,安裝於頭燈內的近紅線裝置,亦能完整補強前方辨識能力。另外,除了前方監視之外,來自後方的危害因素,亦不能輕忽,因此,新系統亦將雷達監控擴及至車輛後方區塊,以建構完整的主動安全防護。
除了負責監測之外,新一代主動撞擊安全防護系統,更在發出撞擊警示後,同時進行預縮安全帶的防護動作,以確實將車內乘員控制在最安全乘坐姿勢;若系統仍未察覺駕駛已進行煞車動作,將進行介入以啟動主動煞車系統,以達到降低最後撞擊時的車速與力道。
另一方面,如果駕駛已展緊急狀況的開閃動作,主動撞擊安全防護系統亦將積極協助駕駛脫離險境,包括運用 VGRS 可變齒比速度感應動力輔助轉向系統(Variable Gear Ratio Steering)、AVS 可變避震器阻尼系統(Adaptive Variable Suspension)與 VDIM 車輛動態整合管理系統,讓車輛能瞬間調整為兼顧靈敏與穩定性的最佳狀態,以協助駕駛進行撞擊閃避動作。
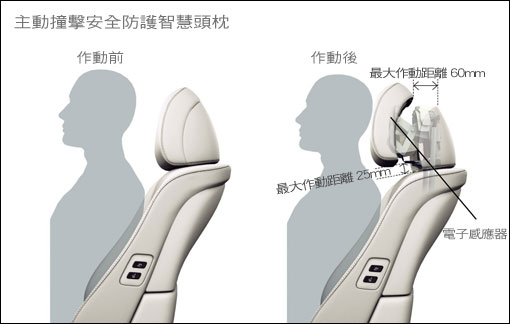
至於先前提到的後方雷達監控系統,亦在主動撞擊安全防護架構中扮演要角。譬如,當雷達系統監測到後方車輛過於接近時,將主動閃爍警示燈以提醒後方車輛煞車以保持距離,一但後方車輛仍持續接近,而提高後方撞擊的可能性後,車內的主動撞擊安全防護智慧型頭枕,頭枕角度將主動往彈起,瞬間在前後座乘員遭遇後方撞擊前,形成最佳的頭部支撐,以防止頸部的嚴重傷害。
新一代智慧停車輔助系統
最後一項 Toyota 所發表的汽車安全科技,則是新一代智慧停車輔助系統。Toyota 在將首套智慧停車輔助系統於 2003 年配置於 Prius 後,該系統便用於支援駕駛轉動方向盤,以順利將車輛停入平行車位或倒車停入車位等動作,並成功減輕駕駛在停車時的負擔。緊接著,該系統於 2005 導入後方攝影系統,精準判別停車格與地上所劃線條,以提升停車輔助系統的效能。
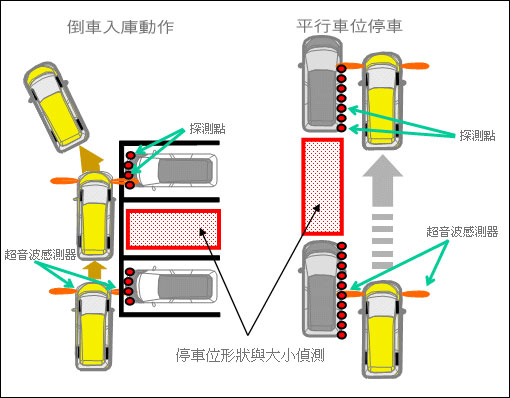
而最新的智慧停車輔助系統,更是全球首次導入超音波感測器,即時測量與其他車輛的相對距離,並可測量出停車格的大小與週遭條件,協助停車輔助系統進行運算,最後車輛將依照先前超音波的感探測點,完成停車動作。



