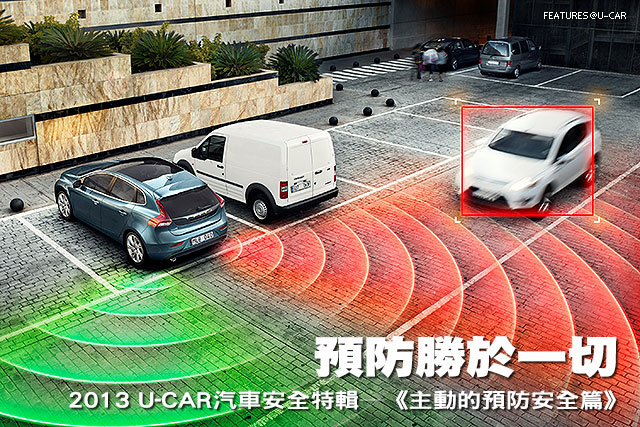
某車廠主動安全部門主管曾在一場介紹未來安全科技趨勢的演講上,以這樣一句話作為開場白:「最安全的車,就是能預先避開意外的車。」這就是「主動預防」勝過「被動防護」的觀念。
汽車安全科技的發展方向,也從傳統的被動安全轉為著重主動安全科技。或許在很多人眼中,這些代表目前汽車領域最先進科技的主動安全配備,總有一長串不太好記的名字,因此今天 U-CAR 要為您深入淺出地介紹這些當前車壇最新的主動安全科技。而唯有您清楚認識這些安全科技,才能在您選購新車時了解其所代表的價值,並且在您擁有它之後,正確的使用以發揮安全配備的最大效能。
影像辨識系統─現代主動安全科技的關鍵
十五年前,如果告訴您:「汽車自已看得見,還懂得閃避危險。」您一定以為這是癡人說夢話。

但這些非但不是夢,其實已成為現代主動安全科技的核心概念─透過車載攝影機與雷達感測裝置搭配影像辨識系統,讓汽車「看」得見周遭路況、並且利用快速運算的電腦,分析判斷所獲得的影像資料,並進一步預估車輛可能遭遇到的狀況,再主動提出避開危險的警示,甚至直接指揮車輛進行避險動作。
目前已將這套概念用於安全配備研發並付諸量產的車廠並不多,僅包括 Volvo、Mercedes-Benz、BMW 等車廠,而很特別的,台灣自創品牌 Luxgen 也擁有這類技術,其「前瞻安全科技」也就是基於此概念發展的。
以主動安全科技排除十大意外類型
科技,始終離不開人性。而現實世界的需求,就成為新科技開發的最大動力。新的汽車安全科技,目的就是要提升行車安全,因此駕駛者在道路上會遇到的危險與挑戰,也就順理成章地成為汽車工程師們的研發課題。
道路上有那些危險因素需要被克服呢?
根據德國聯邦統計局針對德國境內交通事故所做的統計研究,它們將車禍事故發生的原因加以分類,大致可歸納為:不當速度 (超速) 、偏離車道、外車突然闖入車道、混亂的十字路口、視線死角、道路施工、光線昏暗、判斷錯誤、疲勞駕駛與驚嚇失控等十大因素,而全球其它地區的交通事故原因,也大致不會脫離上述範疇。
當前車壇的一些主動安全 (Active Safety) 科技,就是汽車工程師們在這個階段提出來的解決之道。以下我們就要來檢視,這些新主動安全科技如何運作,又發揮了什麼樣的功效?
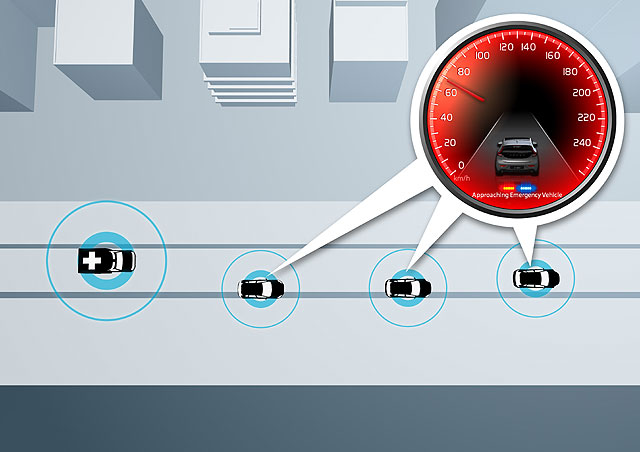
事故主因一:不當速度 (超速)
不當速度(超速)的解決之道:「看得懂」速限標示的輔助系統+車距維持定速系統。
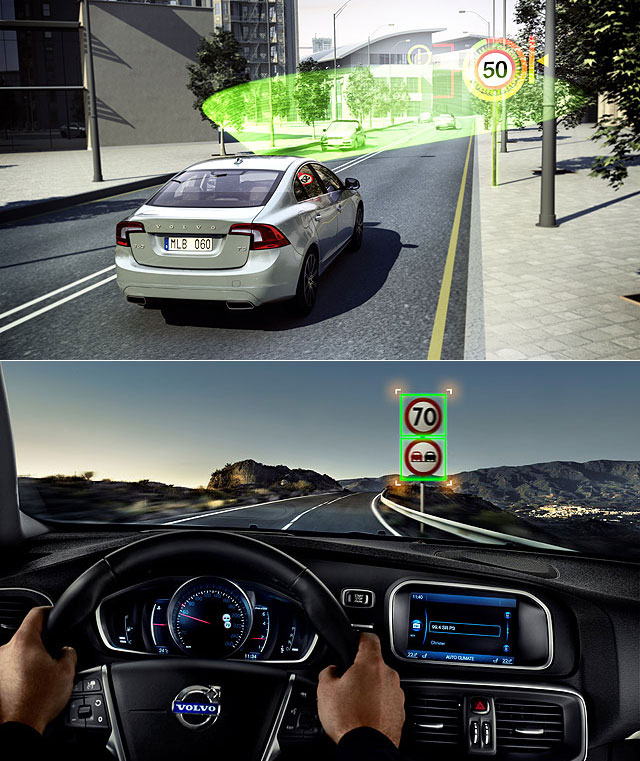
超速行駛是導致大部分交通事故的最大原因,也往往造成相當嚴重的後果。因此工程師為汽車配備一套能夠自動辨識交通號誌,並且讓駕駛者維持應有車速的輔助系統,它是透過攝影機與影像辨識系統來「讀取」速限標示,再配合行車電腦來達到控制適當車速的目的。另外,主動式車距控制定速系統,則可讓車輛與前車維持固定的距離,除可減輕駕駛者在高速巡航時的壓力,也能避免因安全距離不夠而發生意外。
車壇「安全大師」─Volvo 的對策
- QA 車流輔助功能 (Queue Assist)
- ACC 主動車距控制巡航系統 (Adaptive Cruise Control)
- RSI 路標顯示系統 (Road Sign Information)
Volvo 最新世代的 ACC 主動車距控制巡航系統,新增「QA 車流輔助」系統,初次體驗此系統的人,會有一種彷彿搭乘無人駕駛未來車的感覺,因為一旦設定好前車的距離與速度,車輛會隨前車前進自動加減速,或自動煞停、再起步。過去的 ACC 系統設計,車速必須超過 30 公里才會運作,但是新一代的 ACC 系統加上 QA 車流輔助系統,即使在車速低於 30 公里、走走停停的車陣中也能啟動。
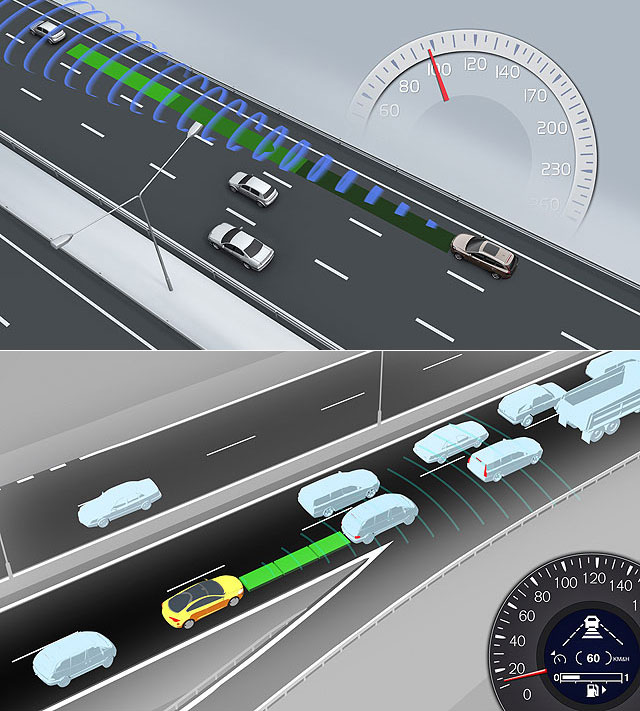
至於 Volvo 另一項高科技─RSI 路標顯示系統,則透過車載攝影機與影像辨識系統來辨識道路上的速限標誌,並且會自動將速限資料顯示在儀錶板螢幕上,以免有時車速太快駕駛人沒看到速限標誌而超速。RSI 系統還可設定超速警示功能,當車輛超速時會發出警示訊息。
事故主因二:偏離車道
對於偏離車道造成的事故原因,其解決之道正是車道偏離預防系統-車子能「看」到路面標線。
根據德國官方研究統計,有 1/6 的嚴重交通事故是因為車輛偏離車道而發生,並有高達 30%的交通意外致死案例是因此類型事故而喪生。「車道偏離預防系統」即是以車載攝影機搭配影像辨識系統,監控車輛與路面標線的距離,它一般都採取兩階段的警告功能來避免事故發生:若車輛無意間偏離了車道,則方向盤會發出震動來警告駕駛者 (觸覺警告) ;如果駕駛者沒有對警告做出反應的話,系統則主動介入透過單一車輪的煞車來修正車輛轉向,使之回到原有車道中央。
車壇「安全大師」─Volvo 的對策
- LKA 車道維持輔助系統 (Lane Keeping Aid)
Volvo 原已有 LDW 車道偏離警示系統,而在 2012 年發表的 V40 車型上,則推出更新的 LKA 車道維持輔助系統。其運作原理是透過車載攝影機掃描道路標線,若車輛有逐漸偏移車道的狀況發生,LKA 系統會先給予方向盤一些反向作用力,提醒駕駛人注意(觸覺警告);如果車輛行進的方向仍未有修正、持續偏離車道,方向盤則會以震動的方式提醒駕駛人注意。LKA 系統設計的運作範圍在高速巡航期間,車速從 65 公里到 200 公里之間,因此不會在低速行車時造成駕駛者的困擾。 (編按:LKA 系統的主控權仍在駕駛人手上,並不會完全干涉車輛轉向。)

事故主因三:外車突然闖入車道
針對外車突然闖入車道導致的事故原因,其解決之道則是「自動監控外車闖入車道系統」。
根據統計,有幾乎 1/3 的嚴重交通事故,都發生在有外車突然闖入您車輛行駛中的車道,造成失控或是閃避不及的碰撞意外。這類「自動監控外車闖入車道系統」透過安裝在擋風玻璃上的攝影機負責擷取路面立體影像,而系統電腦會自動進行預防動作的分析,留意車輛行駛路徑上任何有可能造成危險的物體,其可能移動方向與速度,這些威脅包括轉彎不打方向燈的車輛、穿越馬路的行人或是突然換道的機車與自行車等。
車壇「安全大師」─Volvo 的對策
- CDFAB 單車客偵測暨完全主動煞車系統
在全球掀起的自行車運動風潮也帶來了道路上的新危機,全球首創「CDFAB 單車客偵測暨完全主動剎車系統」,即是針對單車騎士開發的主動安全科技,並首度發表於 Volvo V40 車型上。
這項革命性的安全科技藉由先進感應裝置,可以偵測突然出現在車頭前方的自行車騎士,並且在必要時透過自動剎車避免撞擊。有了 CDFAB 系統,Volvo 車主再也不用太擔心防範或保護突然從巷弄兩側或人行道竄出的自行車騎士。

事故主因四:混亂的十字路口
常常發生交通意外的混亂十字路口,也是統計資料中的事故主因,其解決之道是「十字路口輔助系統、行人/騎士偵測系統」。
十字路口是兩種行車方向車流交會、衝突的地方,也是交通事故發生率最高的的地點。Mercedes-Benz 正在開發的「十字路口輔助系統」,能夠提前警告駕駛者即將發生的危險 (如那個方向有高速來車) ,以提供足夠的反應時間。如果駕駛者沒有對警告做出反應時,系統會自動煞車,避免碰撞意外發生。
而 Volvo 則有可以主動偵測橫越馬路的行人、騎士,並且能在駕駛人來不及反應時自動將車輛煞停的主動安全科技,並已經開始投入量產車型中。
車壇「安全大師」─Volvo 的對策
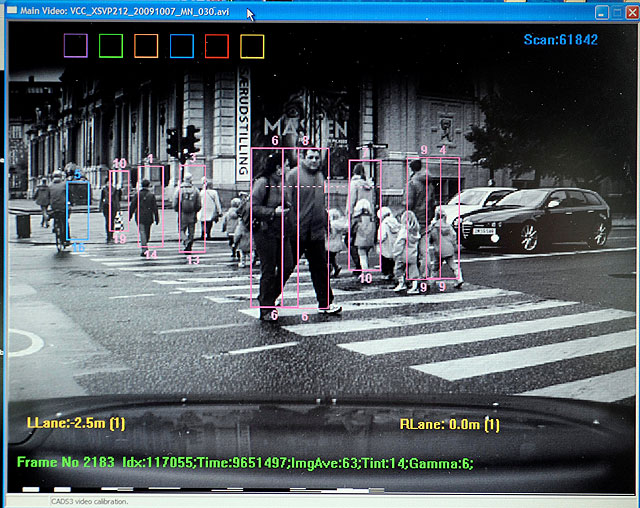
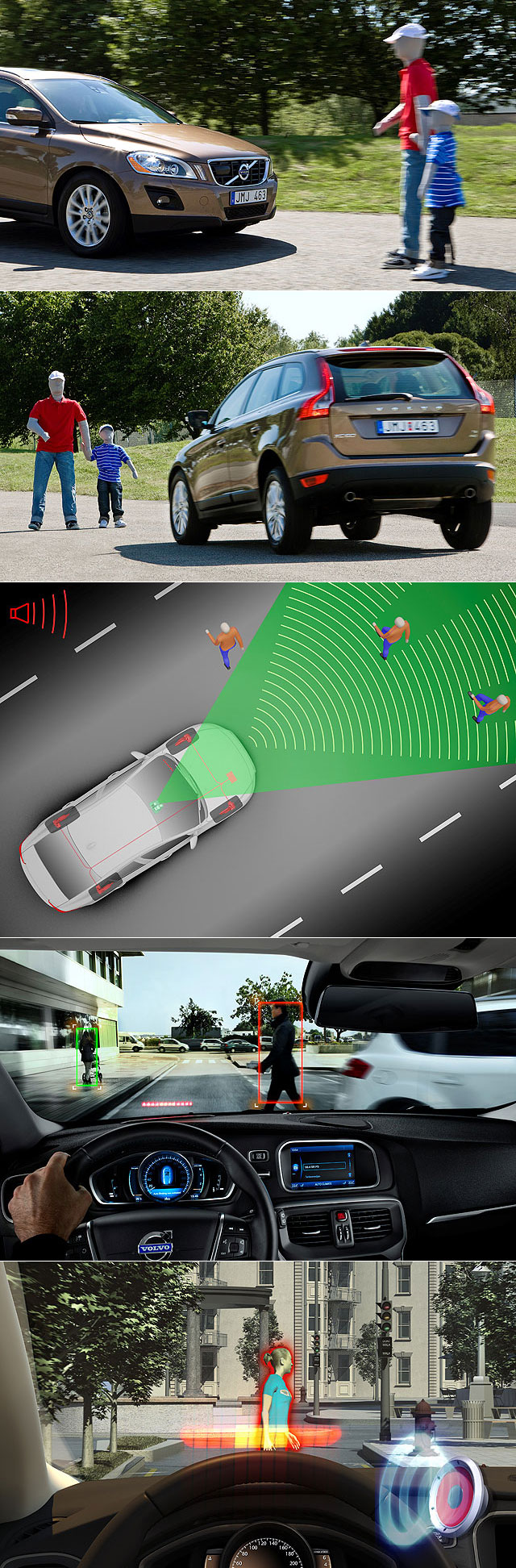
- PDFAB 行人偵測暨完全主動煞車系統
根據統計,發生在台灣的交通事故中,有 12.5%與行人有關,在國外,與行人有關的事故比例更高。Volvo 耗時 10 年研發 PDFAB 行人偵測暨主動剎車系統,廣泛蒐集路況、天候與行人習性,累積超過 50 萬公里的道路測試,讓此系統能辨識 80 公分以上、超過 10 萬種行人動作。Volvo 汽車不只能「看見」行人,還能自動剎車:當車速於 35 公里以下,系統偵測到行人而駕駛者未有反應時,能主動將車輛煞停,以避免撞擊行人的事故發生。
如果相對時速超過 35 公里以上,系統則會盡可能降低車速,藉以減輕撞擊力道,將行人遭受撞擊的傷害降至最低。根據數據顯示,行人碰撞意外事故的嚴重程度與車速息息相關;當車速較慢,行人受傷的風險也會大幅降低。舉例來說,如果系統能將車速從 50 公里降至 25 公里,就能將發生重大傷亡的機率減低 20%,在某些狀況下甚至可以減少達 85%。
事故主因之五:視線死角
關於視線死角而導致的事故,汽車安全科技的解決之道則是「多層次的電子保護區」。
駕駛人如過於專心於前方的路況,則很容易忽略來自其它方向的威脅。有時候則是因為不可避免的駕駛視野死角,而產生意外。開發安全配備的工程師構思了一個「車輛保護層」的概念,它們將車輛周圍化分成三個電子保護區域,外車進入各區系統反應都不同。
首先,「警告區」-最外圍,車輛進入此區系統會對駕駛人提出警告;「保護區」-進行必要的預防碰撞措施,並利用各種功能警示對方與己方駕駛人。「撞擊區」-最內圍,系統自動作動安全系統以保護車內成員。初步發展是利用車上的感知器來判斷威脅等級,未來則會朝向「車與車」的溝通來完成。
車壇「安全大師」─Volvo 的對策
- BLIS 駕駛視覺盲點資訊系統
- CVW 車輛逼近警示系統
- CTA 倒車車側警示系統
車側盲點警示系統,在今日已經是越來越見普及的主動安全配備,但您知道誰是這類配備的發明人嗎?沒錯,就是車壇公認的「安全大師」─Volvo。
早在距今 10 年前的 2004 年北美底特律車展,Volvo 就向全球發表車壇首見的駕駛視覺盲點資訊系統 (Blind Spot Information System,簡稱 BLIS) 。BLIS 是透過車載攝影機監控車側視覺盲點 (死角) ,搭配先進的影像辨識系統來判讀進入視覺盲點區域的車輛,再藉由警示燈號提醒駕駛者注意,可避免切換車道或轉彎時發生碰撞意外。BLIS 系統的偵測範圍涵蓋車輛兩側寬約 3 公尺、後方約 9.5 公尺的範圍,而運作時間不分日夜皆能發揮監視盲區的效果。

而自 2012 年發表的 V40 車型起,BLIS 系統功能又更為進化,搭配新增的 CVW 車輛逼近警示系統後,可透過配置於後保險桿的雷達感測裝置,最遠可監控到距離本身約 70 公尺內快速接近的來車,等於讓 BLIS 的監控能力大幅擴大了七倍之多,當然也給予駕駛者更多的反應時間。
很多時候,當我們以倒車的方式離開車庫或停車格時,總是擔心車輛後方的狀況:會不會有來車?這時候我們恨不得車後站著一個人幫忙看路。
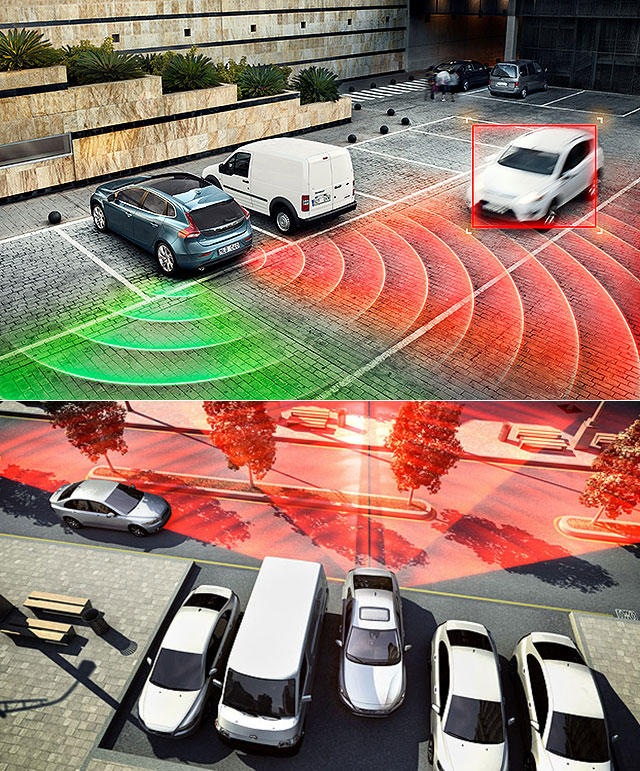
Volvo 的 CTA 倒車警示系統 (Cross Traffic Alert) 就是為了解決上述狀況而開發的主動安全科技。它有別於傳統的倒車攝影機僅能呈現近距離的車後影像,而是利用配置於車尾的雷達感測裝置,偵測車輛後方及側方約 30 公尺的範圍,監測駕駛人在倒車時的視覺死角,只要有車輛進入偵測區域就會利用警示燈號與警示音來提醒駕駛者,讓倒車時的安全性大幅提升。例如當有車輛從左側進入偵測範圍時,CTA 系統就會利用左側的 BLIS 警示燈號與左側喇叭發出警示音。
事故主因之六:道路施工
事故主因的道路施工,其解決之道可以透過「立體影像輔助系統」來改善。
道路施工路段或許因為路面標線消失或是過於雜亂,交通標示也不易判讀,因此也是意外發生頻繁的地點。已有車廠開發利用攝影機與影像判讀系統,來協助駕駛人更安全的通過此區域。
事故主因之七:光線昏暗
光線昏暗也是事故統計的主因之一,對解決這問題,車廠朝開發「智慧型照明輔助系統+夜視輔助系統」做努力。
新一代照明系統,會自動配合各種駕駛狀況,提供最適切的照明輔助。不似傳統燈光設計只有遠燈與近燈兩種模式,新智慧型照明系統會有高速公路模式、山路模式 (主動轉向照明) 、轉彎輔助照明、霧區模式等,而未來的車燈將藉由攝影機監控前方路況,並主動隨路況控制配光。此外一類的夜視輔助系統,則是透過紅外線或是高感度車載攝影機在螢幕上成像,提供駕駛者肉眼看不到的前方路況,也有助於提高夜間行車的安全性。
車壇「安全大師」─Volvo 的對策
- AHB 主動適路性照明系統 (Active High Beam)
與 Volvo 其他主動安全科技相同,AHB 系統亦是利用車載攝影機與影像辨識系統偵測道路上的車輛 (同向與對向車輛皆包括在內) ,並經過系統快速運算對方車輛的方向與速度,精準地在最佳時機切換遠近燈,避免燈光燈影響對方。另外,Volvo 還有 ABL 主動轉向氣體放電式頭燈,可提供駕駛者在彎道或山路上,有更佳的照明效果。

事故主因八:判斷錯誤
屬於人為的判斷錯誤也是事故主因之一,其解決之道是建立「車與車的溝通系統」。
IT 革命後,汽車將越來越像是一部行動電腦。目前有不少新車已能在行車中連結網路,隨時隨地上網,或能在車內進行行動會議;而在開發中的未來汽車上,能更重要的突破是汽車的對外溝通對象不再侷限於固定的電腦工作站 (如辦公室) ,而是可能將擴及汽車與汽車或是汽車與交通資訊系統之間的對話。
屆時可能車輛會對向來車傳來諸如:「1 公里前路面積水,請減速避免打滑。」的警示訊息。甚至連車輛在即使避免不了的碰撞事故發生前,都還能互相傳遞彼此的車輛資料 (如車型、車重、速度等) ,讓車內防護系統可以立刻計算出最適當的保護成員措施。有了車與車的溝通介面之後,汽車將變成一種類有機體。
事故主因九:疲勞駕駛
同樣位居事故主因的疲勞駕駛,向來困擾全球各地,因此,車廠也積極尋找解決之道,當前的科技主流是「駕駛者疲勞偵測系統」。
研究指出,有 10~20%的嚴重交通事故是由於駕駛者過度疲勞造成的,其比例甚至比酒駕肇事還高。長時間的駕駛,將導致注意力降低,反應速度也變慢。車輛工程師開發駕駛者疲勞偵測系統主要有兩個方向,一是利用監控諸如駕駛者的眼皮眨眼時間這類的參考點,發現一有打瞌睡等狀況會及時做出警示或更適切的處置;另一個則是利用車載攝影機監控車輛行進軌跡,如有異常狀況則判斷駕駛已經出現疲勞駕駛現象,會立即提出警告。
車壇「安全大師」─Volvo 的對策
- DAS 駕駛輔助警示系統」(Driver Alert System)
DAC 系統透過車載攝影機持續監控並記錄車輛與路面標線的距離,一旦系統察覺車輛的行駛軌跡有異,會判斷駕駛人可能已經因為疲勞駕駛而注意力不集中,即會在儀表板顯示咖啡杯燈號與警示音,提醒駕駛者該休息一下了!

事故主因十:驚嚇失控
或許大家覺得很意外,但驚嚇失控確實名列事故主因之一,其解決之道得倚賴「預防性的輔助操駕系統」。
很多駕駛人在遇到意外狀況時 (如突然從路旁跑出來的行人、前車突然緊急剎車) ,往往都會因驚嚇而做出錯誤的動作。新世代的主動安全科技會利用雷達或攝影機偵測可能的危險,並會在駕駛人還未做反應之前,先為剎車系統加壓,待駕駛人踩下剎車時就能發揮最大剎車力道;而當系統判斷駕駛人來不及反應時,還會自動煞停車輛,或盡可能將車速降至最低,減少撞擊造成損害的程度。
車壇「安全大師」─Volvo 的對策
- Volvo City Safety 都會安全防護系統 (對車)
- CWFAB 碰撞警示暨完全主動煞車系統 (對人)
相信很多駕駛人都有過這樣的經驗:在走走停停、緩慢前進的塞車車陣中,偷空切換電台頻道、或是偷看個手機訊息,卻突然被前方停下的車輛嚇出一身冷汗,急踩剎車才沒撞到前車?
Volvo 的 City Safety 都會安全防護系統,就是為了避免這種追撞危險而開發,它也是車壇此類自動剎車系統最早投入量產的始祖。
City Safety 系統針對都會區行車狀況設計,因此設定在車速低於 30 公里以下時運作,車頭雷達感測裝置會掃瞄車輛前方 6 至 8 公尺處,當前方車輛忽然減速或停止,而駕駛者沒有做出反應時,City Safety 系統就會立即主動煞停防止追撞事故發生。只要與前車之間的相對時速低於 15 公里,City Safety 系統是可以將車輛完全煞停,避開碰撞;但若車輛與前車相對時速差距在 16 至 30 公里間,City Safety 系統則會盡其最大可能將車輛減速,以求大幅減輕撞擊力道,將傷害減至最低。

根據美國 IIHS 高速公路安全保險協會在 2011 年的報告當中顯示,VOLVO 汽車配備的 City Safety 都會安全防護系統自動煞車功能,能夠有效地避免碰撞事故的發生,進而減少發生車禍而向保險公司索賠的頻率。
而從 2012 年起,新一代 City Safety 系統在效能上又進行了大幅升級,運作的車速從原來的 30 公里一口氣提高至 50 公里,表示提供駕駛人更大範圍的行車安全防護。不僅如此,美國 IIHS 國際權威機構在 2013 年最新的正面撞擊預防系統評測中,也將搭載 City Safety 都會安全防護系統的 Volvo S60 轎跑車/ XC60 跨界休旅車評選為「優異」的最高評價。
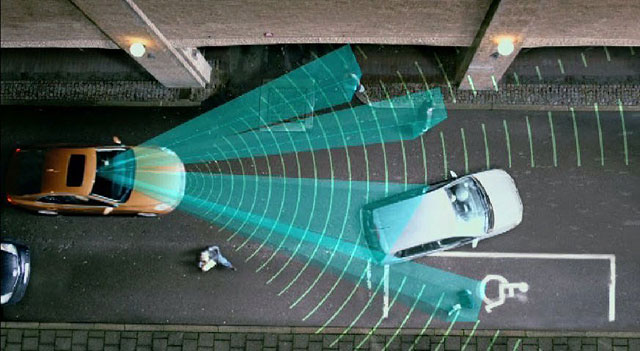
CWFAB 碰撞警示暨完全主動煞車系統看似與 City Safety 功能相近,但它的先進雷達擁有更寬廣的偵測角度,所能偵測與判讀的範圍更大,所以除了能偵測前方車輛外,也能夠偵測行人、單車的移動狀況,或是偵測靜止物,簡單來說,CWFAB 系統能利用位於水箱護罩後方的雷達感測裝置,持續監測前方路況,車輛與前車相對時速低於 35 公里以下時,系統甚至能夠完全將車輛自動煞停,避開原本可能因碰撞造成的傷害。
未來目標:不會碰撞的汽車
未來十年,主動安全科技的發展方向非常清晰:工程師們將繼續提升諸如 City Safety/CWFAB 這類自動剎車系統的效能、影像辨識系統運用範圍再擴大、人工智慧將更深入地加入安全科技之中,甚至還可能發展出車與車溝通的新形態網路,以更 Smart 的方法協助駕駛者避開可能發生的危險。
Volvo 汽車即曾表示,它們將朝打造出「不會碰撞的汽車」目標前進,而這家執車壇安全科技牛耳的車廠還有個更遠大的目標:它們對所有 Volvo 車主許下 2020 年 Volvo 車內乘客零傷亡的安全承諾!